About me
I am a Lecturer in Robotics at School of Electrical and Mechanical Engineering, Faculty of Technology, University of Portsmouth (UoP), UK. Previously, I worked at Shenyang Institute of Automation (SIA), Chinese Academy of Sciences (CAS), Shenyang, China, and at Italian Institute of Technology (IIT), Genova, Italy. I got my PhD degree in Mechatronics from University of Chinese Academy of Sciences (UCAS) in 2019.
My research interests focus on Robotic Systems, Human-Robot Interaction, and Artificial Intelligence (AI). I am keen to apply these technologies to solve real-life problems. Meanwhile, I am very fascinated by space, especially space robotics projects. I am building my own research line (Human-AI-Robot Interaction Group) at UoP.
I am serving as Associate Editor for Frontiers in Robotics and AI and Journal of Field Robotics.
News
- [Jul, 2025] Xin serves as Local Chair for IEEE ARM 2025 (chairs the opening ceremony).
- [Dec, 2024] Xin serves as Session Chair for IEEE ROBIO 2024.
- [Oct, 2024] Xin serves as Session Chair for IEEE M2VIP 2024.
- [May, 2024] Xin co-organizes a Research Topic in Frontiers in Robotics and AI (Wearables for Human-Robot Interaction & Collaboration).
- [Jul, 2023] Xin serves as Session Chair for ICIRA 2023.
- [Jun, 2023] Xin co-authors a paper nominated Best Paper Finalist in IEEE ARSO 2023 (Bi-Directional Human-Robot Handover Using a Novel Supernumerary Robotic System).
- [Oct, 2022] Xin co-organizes a Research Topic in Frontiers in Robotics and AI (Human-Centered Robot Vision and Artificial Perception).
- [Dec, 2021] Xin co-organizes a Special Issue in International Journal of Aerospace Engineering (Human-Robot Interaction and Collaboration for Space On-Orbit Servicing).
- [Sep, 2020] Xin is awarded the CAS Outstanding Doctoral Dissertation (100/5000 at UCAS, the only one at SIA in 2020).
- [Aug, 2019] Xin serves as Session Chair for ICIRA 2019.
- [Jul, 2019] Xin is awarded the Dean’s Award for Excellence of CAS (400/5000 at UCAS, one of four at SIA in 2019)
Selected Research
My research journey began with Robotic Grasping since my PhD research topic was about planning and control of space robots for grasping cooperative or non-cooperative objects. Then, I moved on to Manipulation, targeting robotic sampling (in space), polishing, and assembly, where the force interaction is the key point. In the first three years after I graduated with my PhD, I worked as a Project Manager/Leader in an industrial project — [Robotic Transformation of a Long-Boom Hydraulic Crane for Autonomous Transporting Heavy Loads].
I started working on wearable robots in the Human-Robot Interaction domain after I worked at IIT.
Robotic Grasping & Manipulation
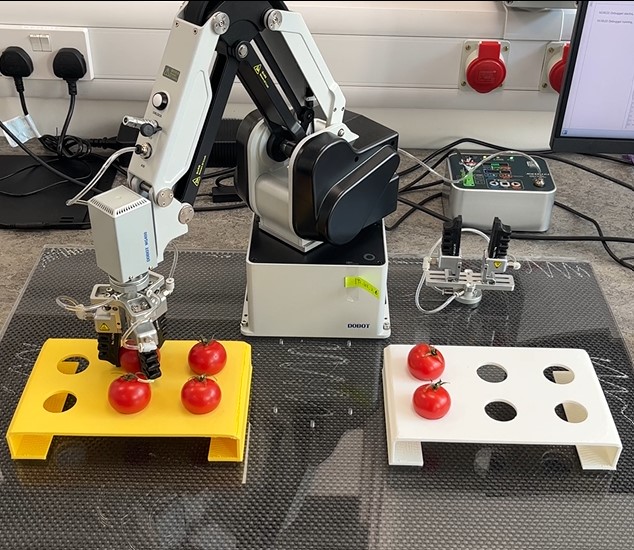
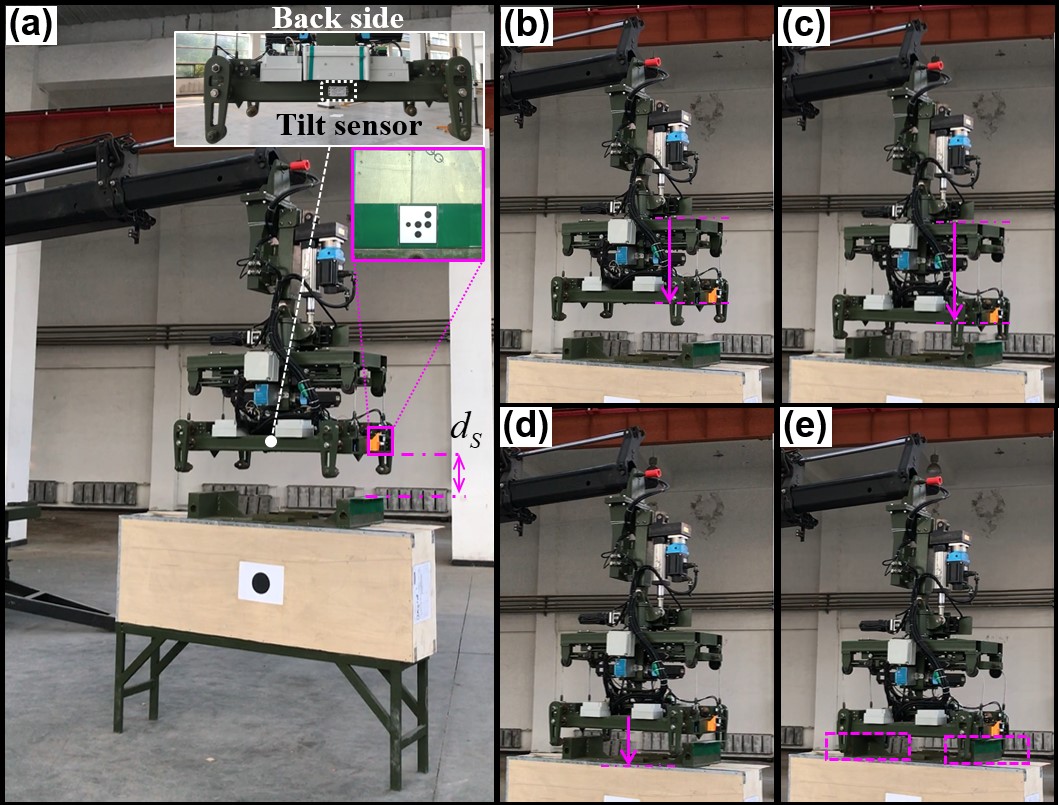
Zhang, X.* , Zhou, H., & Liu, J. (2025). VBMGS: A Vision-Based Multistep Grasping Strategy for a Long-Boom Hydraulic Robot System with Structural Flexibility. Construction Robotics, 9(29), 1-23. Supplementary video, click here!
 |
|
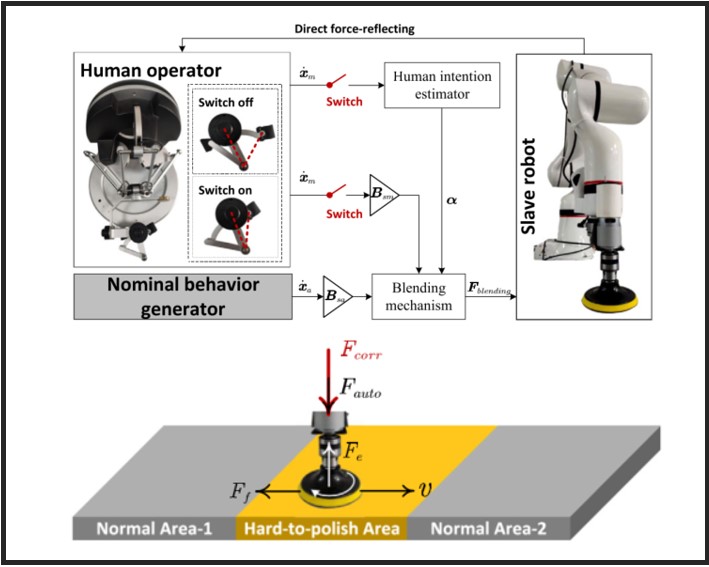
Zhou, H., Zhang, X.*, & Liu, J *. (2025). A corrective shared control architecture for human–robot collaborative polishing tasks. Robotics and Computer-Integrated Manufacturing, 92, 102876. Supplementary video, click here!
 |
|
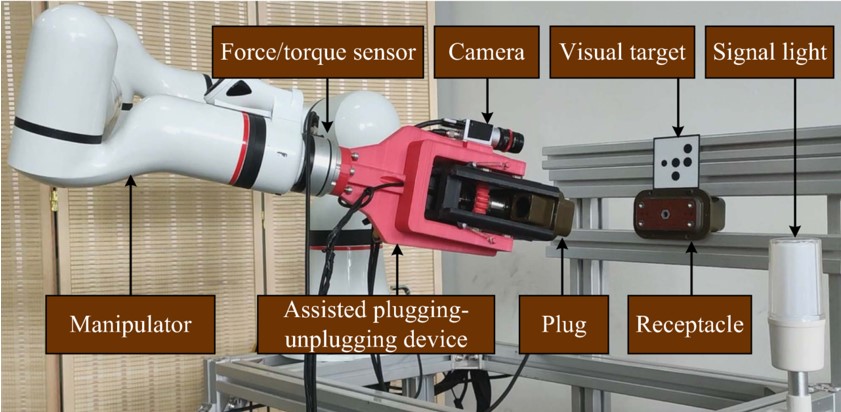
Zhou, H., Zhang, X.*, Liu, J. *, & Ju, Z. (2024). An active-passive compliance strategy for robotic plugging and unplugging of rocket electrical connectors. IEEE/ASME Transactions on Mechatronics, 30(2), 1014-1025. Supplementary video, click here!
 |
|
Zhang, X. , Liu, J.*, Feng, J., Liu, Y., & Ju, Z. (2020). Effective capture of nongraspable objects for space robots using geometric cage pairs. IEEE/ASME Transactions on Mechatronics, 25(1), 95-107.
 |
|
Human-Robot Interaction
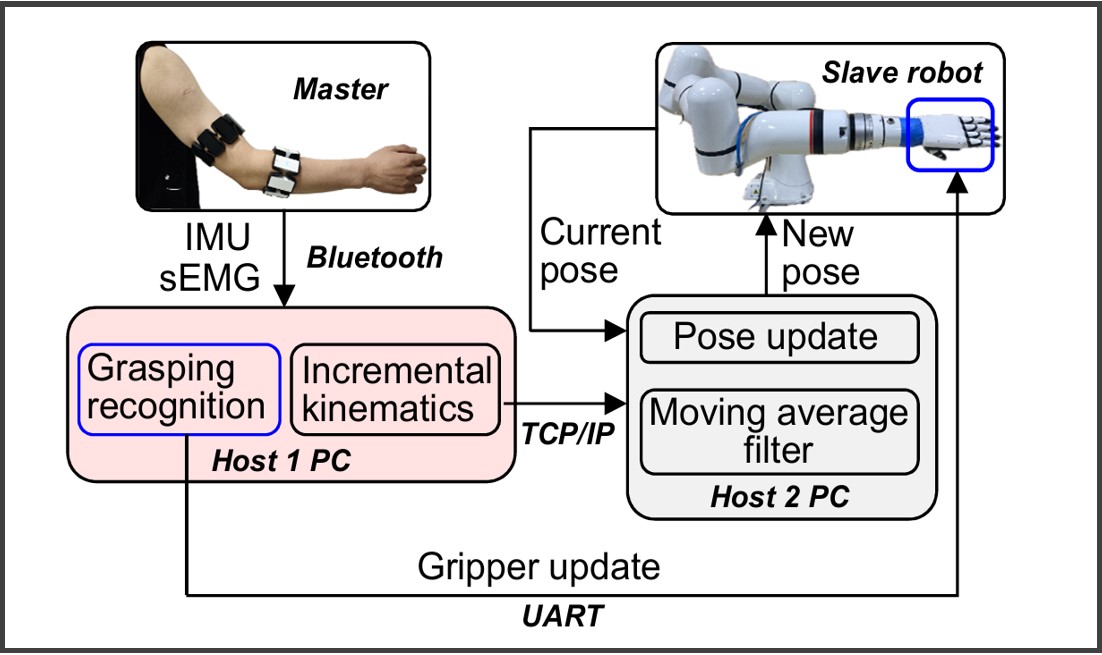
Jia, J., Zhou, H., & Zhang, X.* (2024). An Agile Large-Workspace Teleoperation Interface Based on Human Arm Motion and Force Estimation. In 2024 IEEE International Conference on Robotics and Biomimetics (ROBIO), 117-122. Supplementary video, click here!
 |
|
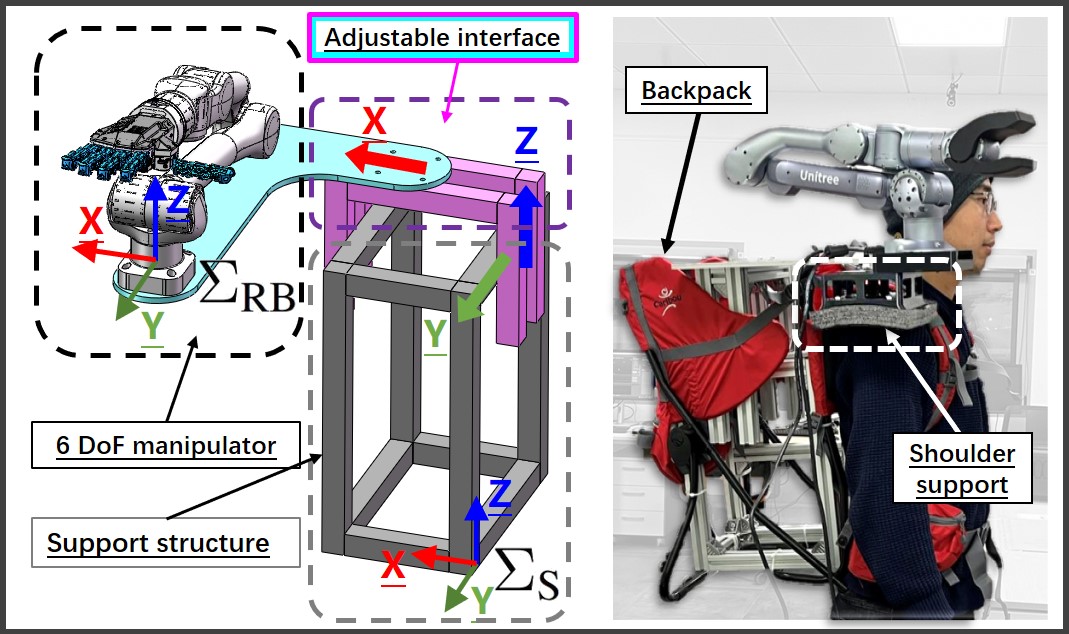
Zhang, X.* , Balatti, P., Leonori, M., & Ajoudani, A. (2023). A human motion compensation framework for a supernumerary robotic arm. In 2023 IEEE-RAS 22nd International Conference on Humanoid Robots (Humanoids), 1-8. Supplementary video, click here!
Du, Y., Zhang, X.*, Leonori, M., Balatti, P., Jin, J., Wang, Q., & Ajoudani, A. (2023). Bi-directional human-robot handover using a novel supernumerary robotic system. In 2023 IEEE International Conference on Advanced Robotics and Its Social Impacts (ARSO), 153-158.
 |
|
Teaching & Supervision
- Introduction to Programming (Lab Sessions)
- Programmable Logic Controller (Module Coordinator)
- Supervised PhD students: Hao Zhou, Zhihui Xue, Lei Liu
Funding & Projects
- A Feasibility Study on Human–Robot Collaboration via Sensorimotor Integration Between Wearable Interface and Supernumerary Robotic Arm (6,000GBP), PI, Supported by UoP-NARF, August/2025—Jul/2026
- Underwater Robot Manipulation Techniques and Methods Based on Satellite Communication (Be responsible for the tele-impedance interface design and implementation, 300,000RMB), PI, Supported by Basic Research Foundation of SIA, Jan/2024—Dec/2026
- Coupling Interaction Mechanism of Small Body Sampling Robot and Active and Passive Compliant Manipulation Method (300,000RMB), PI, Supported by NSFC, Jan/2022—Dec/2024
- Active and Passive Composite Compliant Operational Technology of Space Robots for Small Body Surface Sampling Task (80,000RMB), PI, Supported by National Postdoctoral Science Foundation, Jul/2020—Dec/2021
- Robotic Transformation of a Long-Boom Hydraulic Crane (2,750,000RMB), Project Manager, Supported by CASIC (Industrial project), Jun/2019—June/2022
More Info
Picture Gallery
With the support of UoP’s Robotics and Automation Lab, a variety of advanced robotic devices (cobots, humanoids, and robotic dogs) can help us to explore our fancy ideas.